Verification technology that actually works.
Nearly a decade in the making, our proprietary advances in computer vision and geographic modeling turn raw pixels into a powerful solution for location verification.
We've developed novel embedding spaces, spatial clustering algorithms, and reasoning engines to ensure our technology overcomes historical limitations of the geolocation category. Oceanir matches the promise of AI performance with rigorous accountability.
Built to see carefully.
Read our manifesto to see how we define depth-3 geolocation: rigorous, auditable, and accountable.

Every pixel carries a clue.
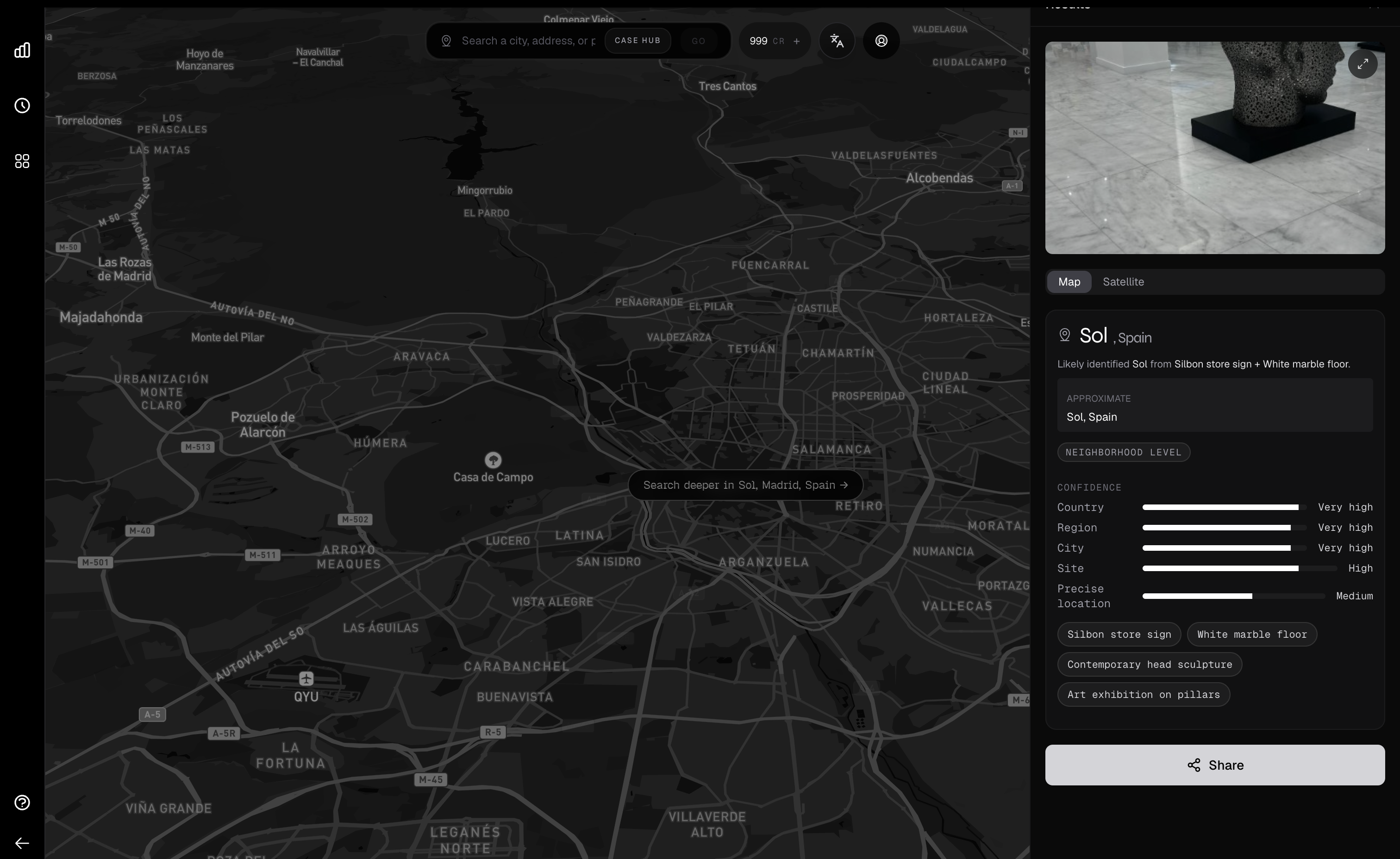
Oceanir reads visible scene details, identifies signals, and returns evidence-backed location checks — no metadata required. The Orca model decomposes the frame into vegetation, architecture, road surface, sky gradient, and signage, then ranks defensible location candidates from those signals.
Three depth levels scale the analysis. D1 reads the environment — road markings, signage, building styles — to return a region. D2 adds extended visual references and a VLM cross-check for local precision. D3 runs full visual matching with keypoint verification for property-level workflows where that precision is requested. Every depth produces ranked candidates with confidence scores, not a single black-box pin.
What would take hours of manual review returns as structured evidence in seconds. Fragments in. Evidence out.
Orca · Direct Inference
Visual Signal Alignment
Embedding Spaces · Spatial Clustering

Product boundaries
Oceanir verifies visual evidence involving places, properties, vehicles, and location claims. It is not a people-search, identity-matching, or private-individual tracking product.
No identity matching
Oceanir does not provide face recognition, biometric identification, person matching, identity resolution, people-search, behavioral profiling, or tools designed to locate or track private individuals.
Evidence for human review
Oceanir returns ranked location candidates, visible scene cues, confidence scores, and report-ready context so reviewers can document the final judgment.